CAN Baud rate / speed
All modules on the same bus must be setup to use the same bus speed, it is not possible to have for example the ECU set to 500kbit/s, and TCU set to 500kbit/s and a dash set to 1Mbit/s.
Why CAN termination is required
CAN termination is required to ensure reliable communication on a vehicle CAN bus. CAN is a high-speed differential bus, and without proper termination, signal reflections occur at the ends of the bus, leading to communication errors and unstable operation.
A correctly terminated CAN bus uses two 120 Ω termination resistors, one at each end of the bus, resulting in a total bus impedance of approximately 60 Ω.
MaxxECU termination support
MaxxECU GEN1 (MINI, STREET, RACE, RACE H2O, PRO): Built-in termination on CAN1.
MaxxECU PRO (CAN2): No built-in termination.
MaxxECU GEN2 RACE: Built-in termination on both CAN buses, software selectable.
Proper CAN termination is essential for stable and error-free CAN communication.
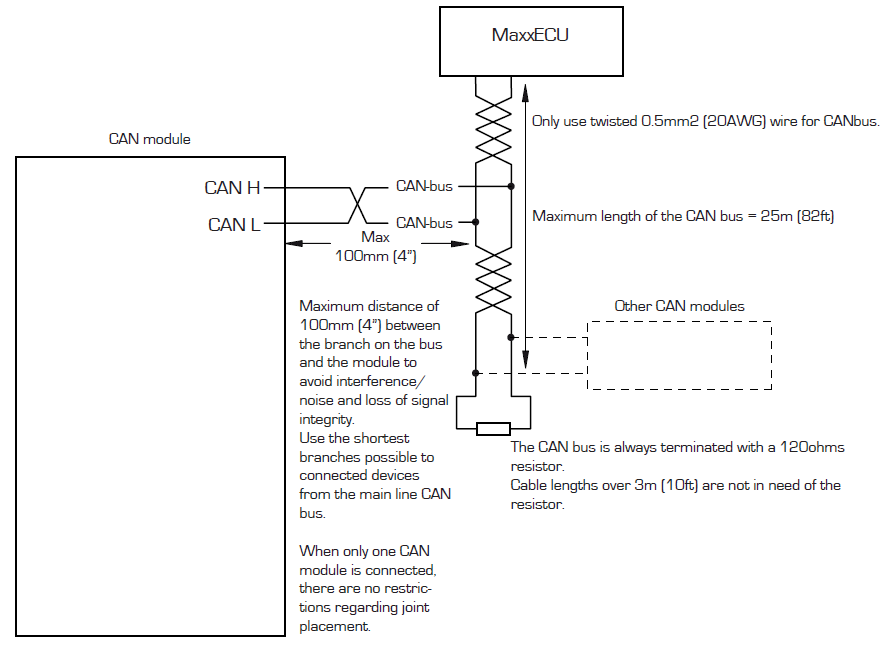
Example of CAN wiring.